
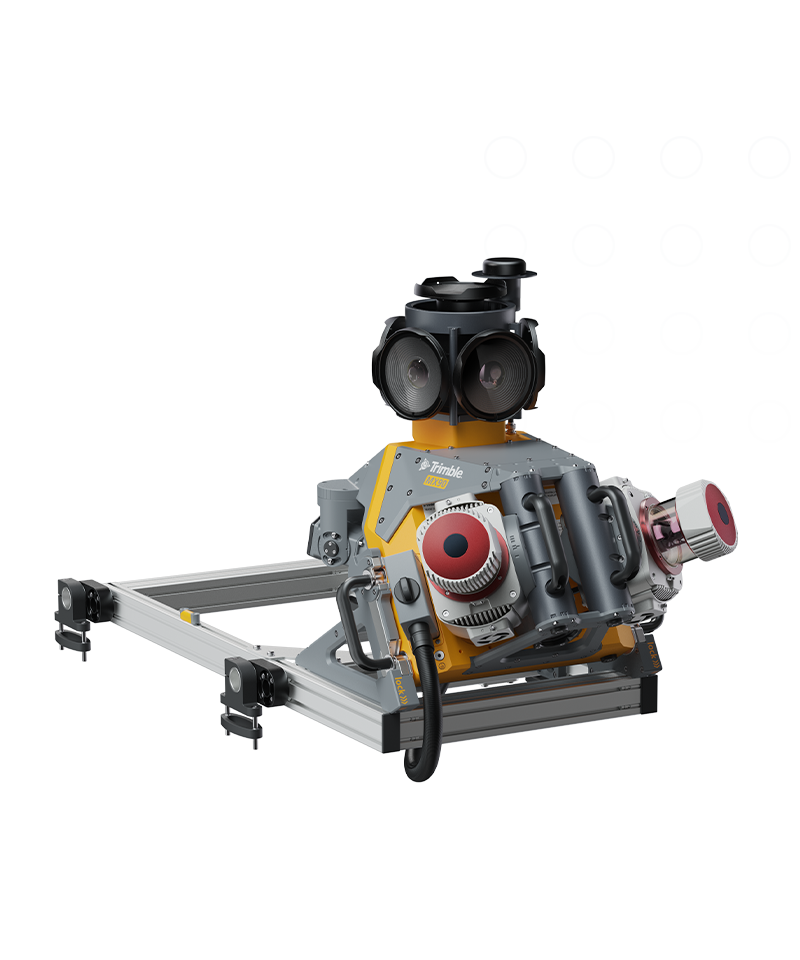
NavLiDAR X1手持三维激光扫描仪
>> NavLiDAR X1体积小、重量轻,12V直流供电,适用于手持、小型无人机、移动机器人等各种平台
>> NavLiDAR X1配备远距离WIFI模块,点云、位姿实时回传
>> NavLiDAR X1外设接口丰富,标准网口实时输出点云与位姿,便于集成入移动机器人等其它系统
>> 配套移动客户端软件,可便捷地进行设备控制及点云、位姿回传显示
>> 点云存储为标准工业格式,可直接与其它工业处理软件对接
>> NavLiDAR X1基于3D SLAM算法,无需GPS等支持
- 产品描述
- 技术指标
- 相关下载
-


-
整体性能
电源输入:12V DC
尺寸:225x110x110mm
重量:<1.8Kg
功率:~50W
数据接口:Ethernet*1,USB3.0*1
内部存储:256G SSD
无线模块:900Mbps
工作温度:-20~40℃
扫描性能
激光雷达:Velodyne16线
扫描精度:3 -5cm
扫描距离:100m
视角范围:水平360°,垂直270°
扫描方式:移动式(六自由度任意移动)
移动线速度:<8m/s(推荐0.5~2m/s)
移动角速度:<60°/s
点云频率:最高30万点/秒
环境要求:室内或室外
定位性能
位姿形式:六自由度(x,y,z,yaw,pitch,roll)
相对精度:相对初始点的位姿漂移<0.8%
绝对精度:相对先验地图位置<10cm、姿态<10°
开发接口:控制、位姿及点云获取API,可定制
定位方式:相对初始点/相对先验地图
输出接口:标准网口,TCP/IP协议
位姿频率:0~200Hz
环境要求:室内或室外








-10505148354.png)